電気情報工学コース5年生の2名がミュンヘン(ドイツ)で開催された国際会議SII2025にて研究成果を発表しました
カテゴリ:事務局
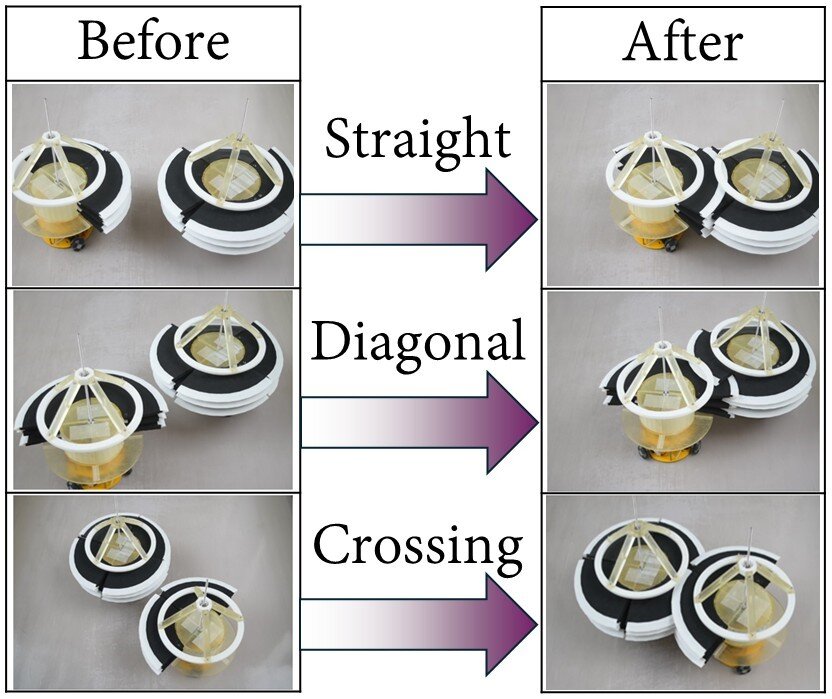
図:シームレスな全方向から連結が可能な構造(Omni-Directional Connector)を持ったロボットによる連結実験の様子
電気情報工学コース5年 小笠原悠吏さんと中新井田登大さんの2名が執筆した論文が国際会議 2025 IEEE/SICE International Symposium on System Integration (SII 2025)に採択され、研究成果をミュンヘン(ドイツ)で発表しました。二人はシームレスな全方向から連結が可能な自己組織ロボット(多数のロボットが連結して様々な形状に変形するロボット)を開発し、従来では不可能であった"十数秒程度で高速にロボットの集合・変形が可能な連結構造"を実現しました。

図:SII2025会場での小笠原さん(左)と中新井田さん(右)

図:研究発表中の小笠原さん
詳細情報:
T. Nakaniida, Y. Ogasawara and T. Akagawa, Ommni-directional Connector for Self-reconfigurable Robots, 2025 IEEE/SICE International Symposium on System Integration (SII 2025), pp.1563-1567 (2025)
関連リンク:
詳しい研究の取り組みについて知りたい場合は、下記の研究室HPをご覧ください。