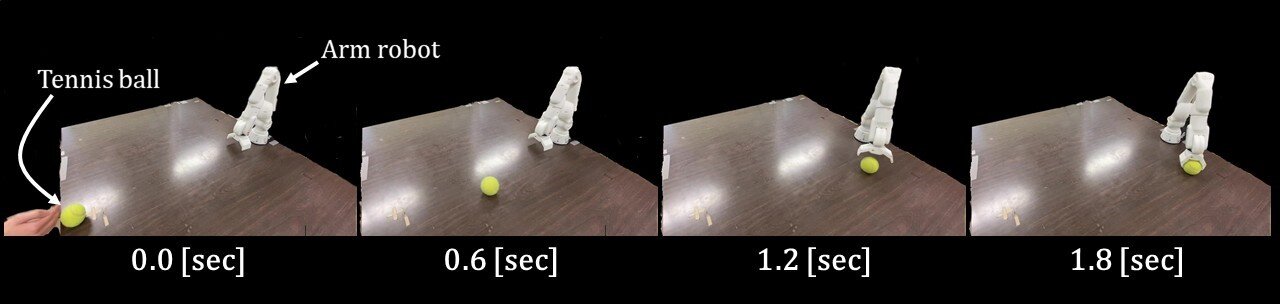
図: 人の手で転がされたテニスボールを追いかけて把持するアームロボット
本研究は筑波大学 システム情報系 知能機械工学域 モーションコントロール研究室の境野翔先生との共同研究で、二人はバイラテラル制御という遠隔操作技術を活用してロボットを制御するAIを開発し、"人の手で転がされたボールを素早く追いかけて把持するアームロボット制御"を実現しました。本研究で用いた"バイラテラル制御に基づく模倣学習"は人間並みに高速な動作を生成可能なAI技術として注目を集めています。本研究ではAIを活用して、転がる方向や速度が変化するボールを把持する課題に取り組みました。
図:ICM2025会場での田頭さん(左)と岡村さん(右)