村山 和裕 Murayama Kazuhiro [工学士]
機械・医工学コース 准教授
専門分野
- メカトロニクスMechatronics
写真

研究課題
- サーボ系の非線形摩擦補償に関する研究
A Study of the Nonlinear Friction Compensation in Serbo Systems
研究シーズ
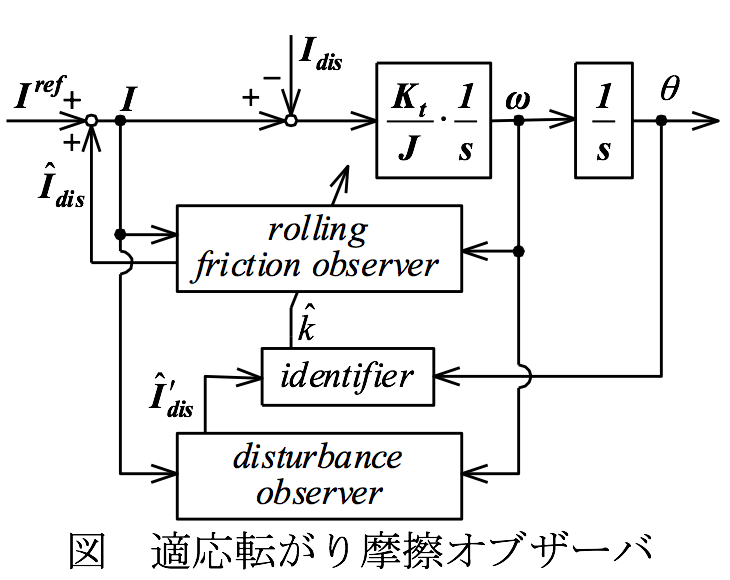
支持系に転がり軸受を用いたサーボ系では,アクチュエータの微小変位時に,転がり出し摩擦と呼ばれる非線形ばね特性が現れます。このため,速度反転時には,位置や速度の制御偏差が発生します。本研究では,下図に示す適応転がり摩擦オブザーバを用いることにより,制御偏差を抑制し,精密な追従制御を可能とすることをめざしています。
画像の解説
適応転がり摩擦オブザーバ
事例
- 3ユニット型配電線移動ロボットに関する研究
- AutoCAD の利用法に関する助言
研究のキーワード
サーボ系,摩擦補償,オブザーバ