赤川 徹朗 Akagawa Tetsuro [ 博士 (ソフトウェア情報学)]
電気情報工学コース 助教
専門分野
- 自己組織ロボットSelf-Reconfigurable
- 信号処理Signal Processing
- 組込みシステムEmbedded System
写真

研究課題
- 生物の集団意思決定を模倣する自律分散自己組織ロボットの集合/変形メカニズムの実現
Gathering/Formation Mechanisms of Decentralized Autonomous Self-Reconfigurable Robots that Imitates Decision-Making in Biological Swarm - 群ロボット環境における局所的通信システムに関する研究
Spatially Seamless Local Communication System for Swarm Robot Environment
研究シーズ
画像の解説
多様な環境への適応を目的に自身の形状を変形させる自己組織ロボットの研究に取り組んでいます。自己組織ロボットは、ロボット同士が集合して単一の個体として振る舞うことで、目的に適した構造を持つ集合体として運用できる特徴を持ちます。
・全周方向から連結可能なロボットの開発
本研究は素早く柔軟な集合や変形による自己組織化を目指します。多くの自己組織ロボットはロボット本体に設置した連結部同士を繋げて集合体となります。しかし、この構造は連結部を合わせるために繊細なロボットの位置調整が求められ、自己組織化に少なくない時間が要求されます。私たちはこの制約を取り払うべく、全周方向から連結可能な構造を持つロボットの開発に取り組みます。
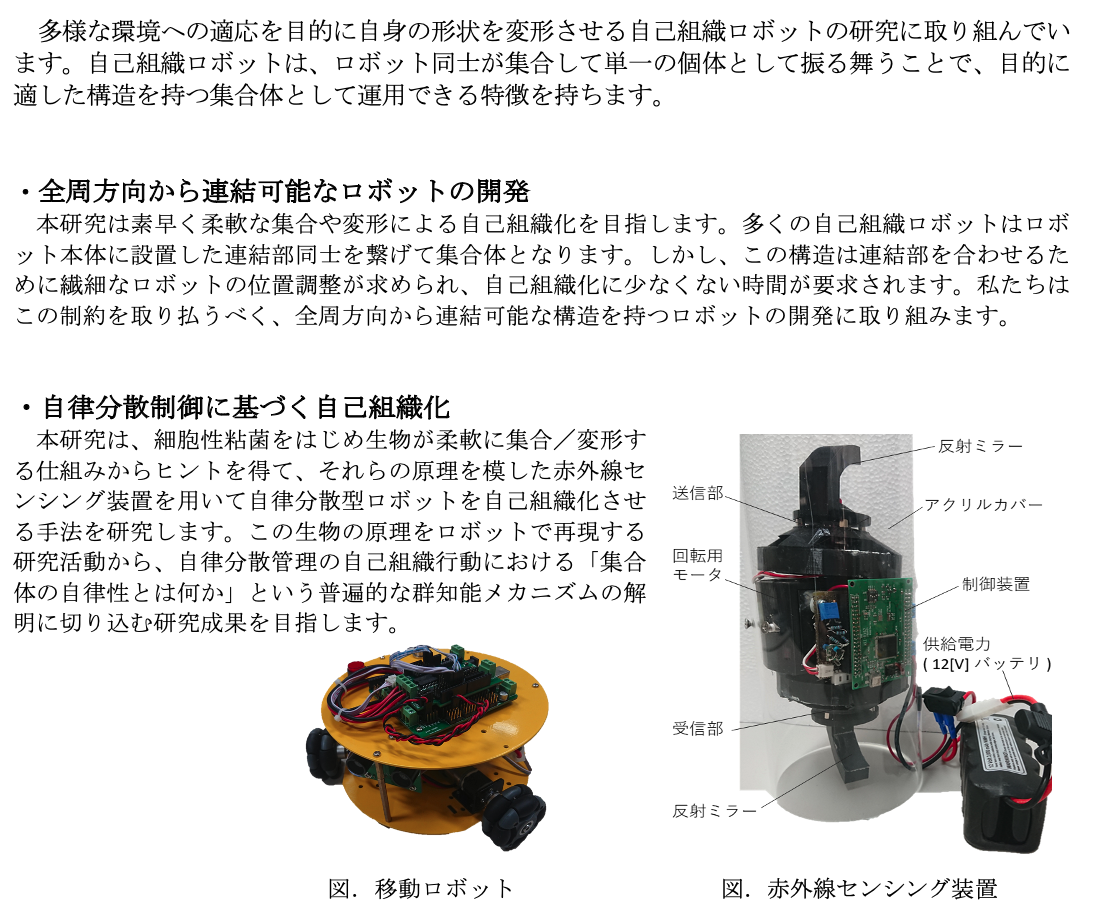
・自律分散制御に基づく自己組織化
本研究は、細胞性粘菌をはじめ生物が柔軟に集合/変形する仕組みからヒントを得て、それらの原理を模した赤外線センシング装置を用いて自律分散型ロボットを自己組織化させる手法を研究します。この生物の原理¬をロボットで再現する研究活動から、自律分散管理の自己組織行動における「集合体の自律性とは何か」という普遍的な群知能メカニズムの解明に切り込む研究成果を目指します。
・全周方向から連結可能なロボットの開発
本研究は素早く柔軟な集合や変形による自己組織化を目指します。多くの自己組織ロボットはロボット本体に設置した連結部同士を繋げて集合体となります。しかし、この構造は連結部を合わせるために繊細なロボットの位置調整が求められ、自己組織化に少なくない時間が要求されます。私たちはこの制約を取り払うべく、全周方向から連結可能な構造を持つロボットの開発に取り組みます。
・自律分散制御に基づく自己組織化
本研究は、細胞性粘菌をはじめ生物が柔軟に集合/変形する仕組みからヒントを得て、それらの原理を模した赤外線センシング装置を用いて自律分散型ロボットを自己組織化させる手法を研究します。この生物の原理¬をロボットで再現する研究活動から、自律分散管理の自己組織行動における「集合体の自律性とは何か」という普遍的な群知能メカニズムの解明に切り込む研究成果を目指します。
研究のキーワード
自己組織ロボット,群ロボット,自律分散,センシング,局所的通信