
今後の研究活動(2025年度)
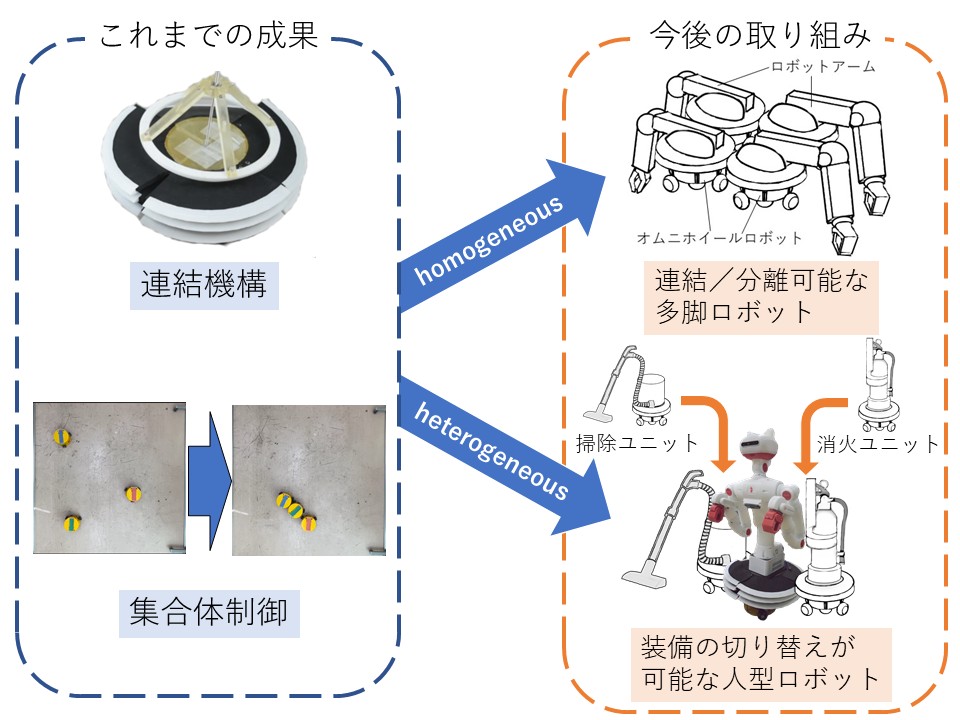
すでにAI(マルチエージェント深層強化学習:MADDPG)を用いた群制御から集合・変形の制御を実現しました。 次なる研究の段階として、自己組織ロボットの有用性を検証するために、 集合・変形を駆使して実社会に求められるタスクに取り組むロボットの開発を進めます。 本研究で開発した自己組織ロボットに上半身人型ロボット(Sciurus17)を組み合わせ、 コネクタを介して後付けされる様々な専用装備を駆使して多目的な作業を実行するロボットを開発する予定です。
また、本研究は細胞性粘菌のような“柔らかい”連結に基づく集合体の振る舞いの再現を目指しています。 柔らかい連結に基づく集合体では、 集合体を構成する個体間の位置関係を明確に定義せずとも目的の変化に応じて集合体の形状を変形・維持します。 細胞性粘菌でいえば、エサを探すためにナメクジ状の移動体へ変形する振る舞いがそれにあたります。 このような“個体間の位置関係が不明確な集合体が変形して移動方法を切り替える振る舞い”を再現するために、 柔らかい連結に基づいて車輪移動から多脚歩行へ切り替わる変形の実現を目指します。