自己組織ロボット(合体変形するロボット)
自己組織ロボット(モジュラーロボット)とは、複数のロボットが連結して1台の集合体として行動するロボットです。 このロボットは、ロボットの連結位置や連結する台数を変えることで様々な形状へ「変形」できることが特徴です。 私たちはこの自己組織ロボットの開発に取り組み、周囲環境や目的に応じてロボットが持つ機能を自由に切り替えられる技術(図1)の実現を目指しています。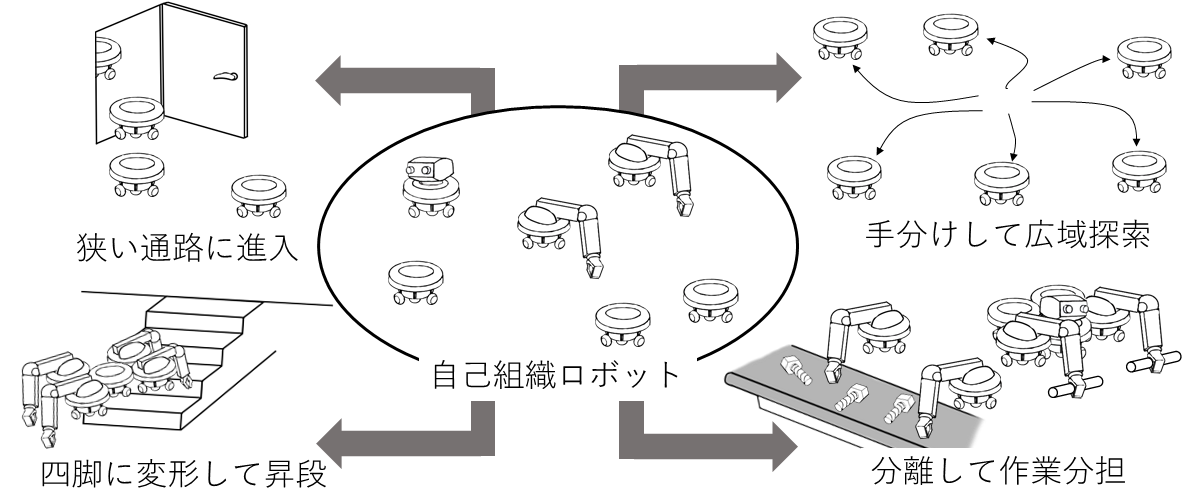
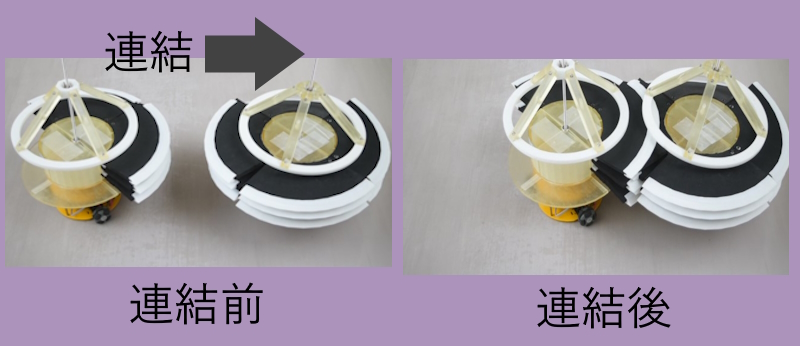
自己組織ロボットの多くは「ロボットが互いの連結口をうまく重ねる」ことでロボット同士を連結してきました。 しかし、この方法では少しでもロボットの位置がズレたら連結ができません。 そのため、ロボットが集合体を作る時や変形する時には慎重にロボットの位置を微調整しなければならず、とても長い時間がかかります。 さらに、この時間はロボットの台数が増えるほど伸びるため、自己組織ロボットの普及を目指すうえで解決しなければならない重大な課題といえます。 そこで、私たちは「切れ目なく全ての方向から連結可能な自己組織ロボット」(図2)を開発し、位置の微調整を必要としない高速な集合・変形の実現に向けて取り組んでいます。