機械学習×様々なロボット
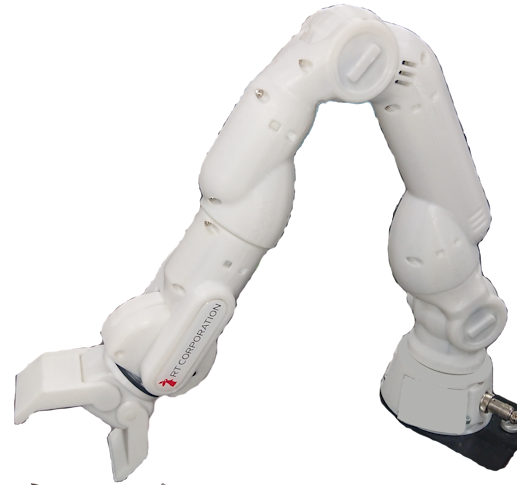
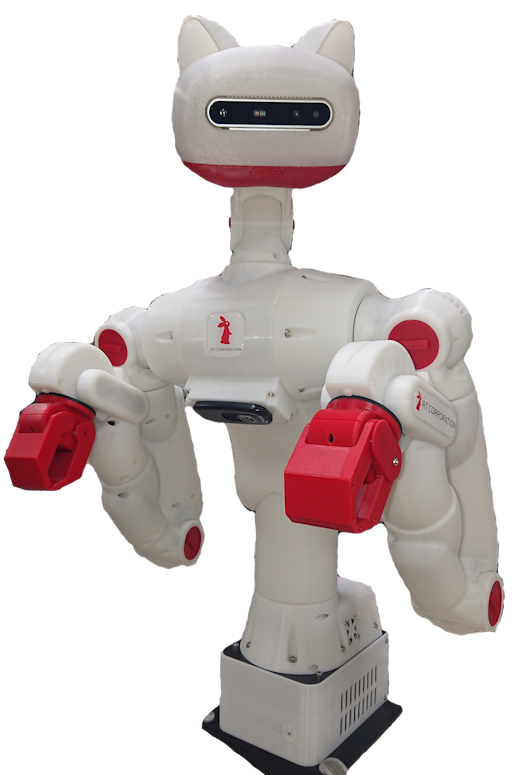
AIを実現する具体的な技術として“機械学習”があります。 機械学習を使うと“目の前に見える物が何か理解する知能”や“動く障害物を避けながら目的地までたどり着く知能”などの部分的な知能をロボットに学習させられます。 本研究室は、オムニホイールロボット(図1)を使用して“群れとして多数のロボットを動かす方法”を研究したり、 アームロボット(図2)や人型ロボット(図3)を使って周囲にある物と接触する作業を学習させます。
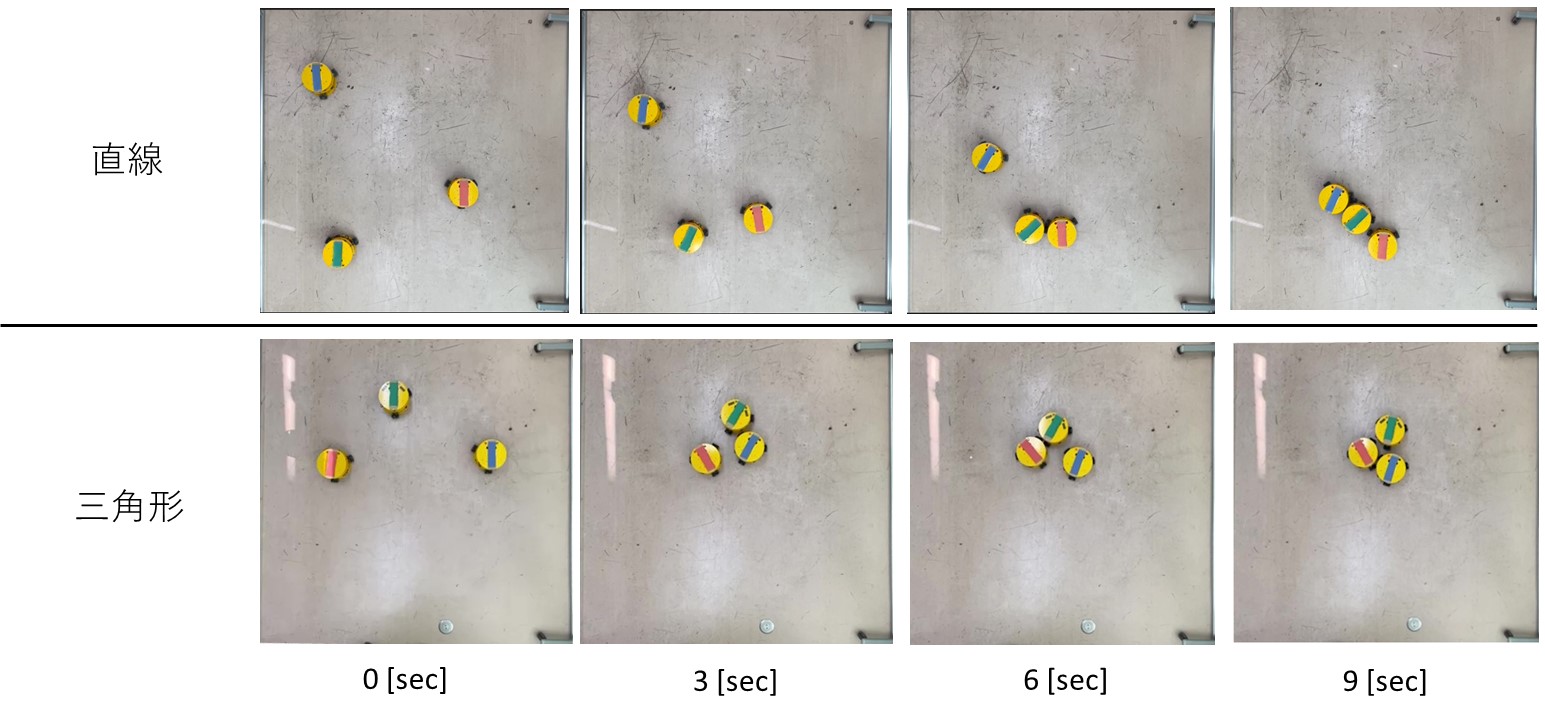
自己組織ロボットの集合体制御(マルチエージェント深層強化学習)
人間が多数のロボットを同時に操縦することは困難です。 したがって、私たちは自己組織ロボット(別ページ参照)の集合や変形を機械学習に基づいて自動化させています。 本研究で用いる“マルチエージェント深層強化学習”という学習手法では、 それぞれのロボットが“他ロボットとの位置関係から自分が移動するべき先”を考えた自律的な行動の結果として、 群れ全体の動きが作られます。